The planar fourbar mechanism is classified according to Grashof's rule. For the practically important crank-rocker mechanism six dependent design parameters are introduced. The relevant constraint equations are derived and discussed.
Introduction
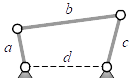
A fourbar linkage is the most simple mechanism having a mobility of one and revolute joints only. It is composed of four binary links - the bars - connected to each others by four revolute joints. With respect to the latter fact it is also called 4R mechanism.
Fig.1: Fourbar Linkage
One of the four links is fixed and called frame. If a link connected to the frame can fully rotate, it is called crank. Otherwise it can only rotate between two angular limits and is called rocker. The floating link opposite to the frame is called coupler and functions as a connecting rod between its neighbour links.
Design Parameters
The fourbar linkage is uniquely defined by its four link lengths a,b,c,d. There are only two restrictions regarding those values.
For successfully assembling the fourbar, the longest link length is required to be less than the sum of the other three link lengths.
lmax<l2+l3+l4(1)
A fourbar linkage is said to be fully rotatable, if its shortest link is able to perform a complete rotation. Grashof's rule is satisfied then:
lmin+lmax<l3+l4(2)
Programming hint: Most programming languages offer min and max functions. So by doubling the left sides of inequations (1) and (2) we can code easily
2*max(a,b,c,d) < a + b + c + d // (1)2*min(a,b,c,d) + 2*max(a,b,c,d) < a + b + c + d // (2) Grashof
without having to filter out the remaining link lengths on the right side of (1) and (2).
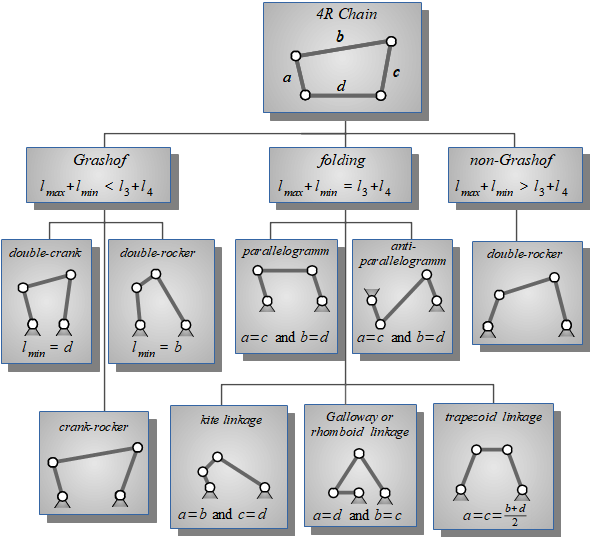
Classification
Fourbar linkages can be classified regarding Grashof's rule (2). If there is a less than relationship between the left and right side of equation (2), the fourbar linkage is fully rotatable. If there is a greater than relationship, the linkage is not fully rotatable. In the special case of an equal relationship, the linkage is able to fully rotate. It will take a pose at least twice during one revolution in which all four binary links are collinear. The linkage is said to fold in that configuration (Fig. 2).
Fig.2: Classification of Fourbar Linkages
Modler [3] and Mc.Carthy [2] have introduced more detailed classification parameters.
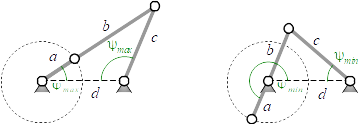
Crank-Rocker
The most important type in practice is undoubtedly the crank-rocker, as it is converting a continuous rotation to a rotational oscillation.
Fig.2: Limit positions of the Crank-Rocker
We can identify the two limits on the rocker angle from the positions, where crank and coupler are collinear. Applying the cosine law to each triangle in Fig.2 we get the rocker angle limits
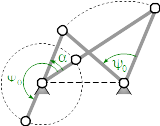
Much more of interest than the explicite angular limits are the angular ranges during one complete cycle.
Fig.3: Angular regions of rocker and crank while moving unidirectional
The rocker's working angular range is named ψ0 and corresponds to the crank's angular range φ0 during tracking motion, when crank and rocker move unidirectional (counterclockwise in Fig.3). On their way back they run in opposite directions.
During a complete cycle of the continuously rotating crank the forward movement of the rocker occupies the crank angle 180∘+α, while the backward movement belongs to crank angle 180∘−α (Fig. 3). Using this we can define the time ratio tf/tb of the rocker moving cycle
tbtf=180∘−α180∘+α.(5)
So if α is not 0°, the crank needs different times for the rocker's
forth and back motion.
Extended Design Parameter Set
The degree of non-uniformity expressed by the ratio tf/tb as well as the angular range ψ0 of the rocker are very meaningful design parameters from the engineer's point of view.
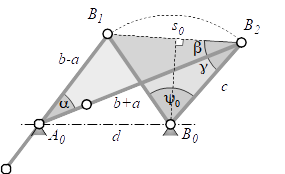
So adding ψ0 and α to the four link lengths a,b,c,d, we now have six design parameters. There must be two constraint equations between them, since only four parameters are sufficient to uniquely define a crank-rocker mechanism.
Fig.4: Geometric relations between six design parameters
Applying the cosine theorem twice for ΔA0B1B2 and ΔB0B1B2 with respect to common side s0 gives (Fig.4)
When eliminating c from equation (9) with help of equation (6), we get another relation for the five parameters a,b,d,α,ψ0 with a nice similar shape to (6).
With the design of a crank-rocker mechanism we can choose values for four out of six design parameters a,b,c,d,α,ψ0. The missing two can be determined by two constraint equations from (6), (9) or (10).
Note: Please observe Grashof's rule (a is shortest length) as well as the three special cases below !
Case α=ψ0
Here equations (9) and (10) reduce to the constraints
a2−b2=d2−c2anda=dsin2ψ0(11)
In addition to ψ0 and α=ψ0 any combination of two link lengths can be chosen, except [a,d], since the missing length's b and c couldn't be determined then.
Case α=2ψ0
Here equations (9) and (6) reduce to the constraints
In addition to ψ0 and α=2ψ0 any combination of two link lengths can be chosen, except [c,d], as the missing length's a and b couldn't be determined then.
Case α=0
Here equations (9) and (6) reduce to the constraints
b2−a2=d2−c2anda=csin2ψ0(13)
In addition to ψ0 and α=0 any combination of two link lengths can be chosen, except [a,c], as the missing length's b and d couldn't be determined then.
The resulting fourbar is called centric fourbar and has interesting and mostly advantageous properties.
Conclusion
From six meaningful design parameters for crank-rocker mechanisms only four are independent. The relevant constraint equations were derived. With those equations the two missing parameters can be calculated in general. Three special cases are discussed.