Valid Initial Pose of Any Fourbar Linkage
Stefan Gössner
August 23, 2017
Department of Mechanical Engineering, University of Applied Sciences, Dortmund, Germany.
Keywords: Fourbar Linkage; Brahmagupta's formula; cyclic quadrilateral; initial pose;
Abstract
For simulating fourbar linkages a valid initial pose is needed. Finding such a pose is sometimes a non-trivial task. In this paper an elementary method for specifying a valid initial pose of any fourbar linkage is suggested.
Introduction
Analysis and simulation of fourbar mechanisms is nothing new and done for decades. The initial pose of the fourbar linkage is usually nothing, we think about very often. Solving the task to animate one cycle of a crank-rocker, we pragmatically let the crank angle start at 0° and stop at 360° (with respect to whatever). But this implies, that we know,
- that the fourbar satisfies the Grashof condition.
- which link is the fully rotatable link.
McCarthy classifies eight basic types with the fourbar [1]. For each type we have to
- check the Grashof condition.
- identify the fully rotatable link, if any.
- choose the driven input link.
- specify an initial input angle for the input link.
- set an end angle accordingly.
Now imagine a scenario, where you can graphical interactively modify the four link lengths. Then you must go through these steps with each length change. The critical step here would be to find an always valid start angle for your input link, if one is even uniquely identified.
The universal method suggested here for finding a valid initial pose is independent of above steps.
Prerequisites
The geometric shape of a fourbar mechanisms is a quadrilateral in every pose. The area enclosed by that quadrilateral becomes extreme, when it is a cyclic quadrilateral. Brahmagupta's formula helps to calculate the aera
Let's take as an assumption, that the fourbar's pose corresponding to a cyclic quadrilateral is always a valid pose.
The maximal area of a cyclic quadrilateral is determined by
with the semiperimeter
The radius
Please note, that Brahmagupta's Formula is of no help to draw the cyclic quadrilatral's shape, i.e. providing the side vectors or the angles between the sides.
The qadrilateral shape corresponding to the fourbar pose is to be determined with given side lengths
The vectorial method applied is making use of an orthogonal operator. The orthogonal vector to
Calculate the Fourbar Pose
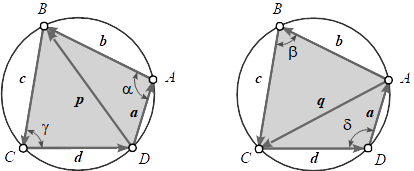
We start analog to the proof of Brahmagupta's Formula with the sum of the area of the two triangles in Fig.1 using half area product each [2] .
Both angles in the triangles opposite to each diagonal sum up to
The perp dot products of the side vectors correspond to the sines of the enclosed angles, so we can write
Introducing these expressions to equations (4) we get for the sine's
The dot products of the side vectors correspond to the cosines of the enclosed angles, so we can write
Now expressing the diagonal vectors by its two triangle side vectors each
and squaring leads us to
Reintroducing these expression to equations (6) yields the cosines
With this we have all ingredients to determine the side vectors
Please note, that trigonometric functions were used here only for clarification. The resulting vector equations (8) describing the initial pose are trigonometry-free.
References
[1] J.M. McCarthy, G.S. Soh, Geometric Design of Linkages, Springer, 2010.
[2] Brahmagupta's Formula, S. Gössner.
[3] Cross Product Considered Harmful, S.Gössner.